Personalizing Haptic Feedback via Uncertainty-Aware Preference Learning
Abstract
Personalizing haptic feedback is difficult because users struggle to assign absolute satisfaction scores. We introduce a preference-based method that infers a user’s latent utility surface from binary pairwise comparisons (A/B choices). A Gaussian Process (GP) preference model encodes smoothness and posterior uncertainty over the stimulus space, while an active query policy selects comparisons by maximizing expected information gain. We incorporate self-reported response uncertainty as per-comparison weights to down-weight ambiguous judgments. By emphasizing relative rather than absolute evaluations, the system mitigates rating fatigue and drift and avoids forcing users to map tactile sensations onto a numeric scale. In simulation with synthetic ground-truth preferences, the method accurately recovers preference maps and optima, achieving higher sample efficiency than uniform/query-agnostic sampling. We also release an open-source framework for interactive preference search over haptic signals.
Contributions
- A binary, preference-driven learning approach to haptic personalization that reduces user fatigue and rating drift.
- An interaction loop that weights comparisons by user-reported uncertainty to improve search efficiency.
- An open-source, extensible code framework for interactive preference search over haptic signals.
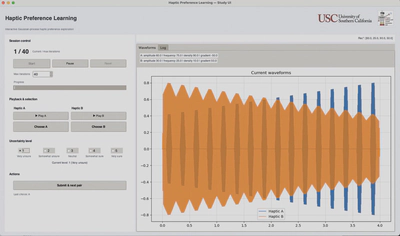
Demo
Acknowledgments
This work is being conducted under the guidance of Dr. Heather Culbertson and Dr. Erdem Bıyık.
Rongtao Zhang
张镕韬 | Master Student
Master’s Student in Machine Learning and Data Science at the University of Southern California.